
溶射作業では、通常、溶射領域から過剰な化合物を排出するため、換気システムが必要となります。綿密に設計された溶射プロセスでも、実際にターゲットに到達する溶射材の量は少なく、付着効率50%でも良い方だとされています。
進歩が見られる分野のひとつは、より複雑で高価なプラズマ溶射やHVOF(高速フレーム溶射)によるコーティングを、よりコスト効率の高いワイヤーアーク方式で再現しようとする取り組みです。アークプロセスが生成する粒子は、非常に微細な上に軽量なものが多いため、排気ガス流から適切に除去することが困難な場合があります。溶射粉塵の処理に実績のある集塵システムが販売されています。残念ながら、こうしたシステムの大多数は、比較的粗雑な気流制御で運用されています。ここでは、スマート技術を導入することで、溶射排気にもたらされる運用上の利益とコスト削減に焦点を当てていきます。
適切なシステム設計
大規模な溶射作業には閉鎖空間が使用され、そこで実際の溶射が行われます。使用されなかったスプレーコンパウンドを筐体から排出する一方で新鮮な空気が取り込まれます。筐体の設計と溶射ターゲットの形状に応じて、問題となる粒子を適切に制御するための最適空気量を決定できます。たとえば、適切な防塵には、毎分10,000立方フィート(cfm)が必要になる筐体もあります。それより多いと無駄になり、少ないと不足になります。
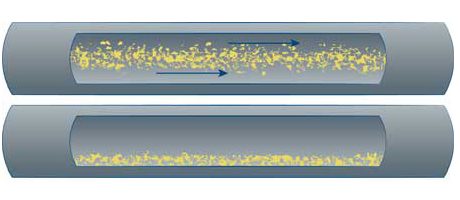 上部:空気の速度が毎分3,500フィートを超えると、粉塵粒子が浮遊します。下部:空気の速度が毎分3,500フィート未満だと、粉塵粒子が蓄積します。
上部:空気の速度が毎分3,500フィートを超えると、粉塵粒子が浮遊します。下部:空気の速度が毎分3,500フィート未満だと、粉塵粒子が蓄積します。
この出発点から、適切な集塵システムを設計できます。通常、集塵時ステムには、粉塵を搬送するダクト、空中の粉塵を補修するフィルター、風量生成のためのエネルギーを提供するファンが含まれます。10,000 cfmシステムの排気ファンには、30~40馬力が必要になります。風量要件は通常固定されており、筐体を再設計しない限り変更するものではありません。ラウンドダクトで粉塵を搬送するには、一般的に3,500~4,000 fpmの速度が最適であると言われています1。空気の移動速度が遅いと粉塵の粒子がダクト底部に落下して沈着するため、火災の危険やダクト閉塞のリスクが発生します。逆に、空気の移動速度が速いと、ファンのエネルギーを無駄に消費し、ダクトに不要な摩耗が生じます。この例では、毎分3500~4000フィートの速度で毎分10,000立方フィートを移動させるには、直径22インチのラウンドダクトを選択する必要があります。この場合、断面積は2.6398平方フィートで、速度は毎分3788フィートになります。
ファンと静圧
工業用換気扇は、部分真空を作り出し、システムに空気を引き込みます。この部分真空は静圧と呼ばれ、通常は「水位計のインチ」で測定されます。システム設計者は各種数学モデルを使用して、目標風量の達成に必要な静圧を判断します。必要な静圧に影響するシステム要素には、次のようなものがあります。
- 溶射筐体のサイズと形状
- ダクト内のエルボー(またはターン)の数と半径
- システム内のダクトの全長
- 使用するダクトの直径と空気速度
- 集塵機の選定
- アフターフィルターアイテム(HEPAフィルターや排気サイレンサーなど)
こうした要素は、通常、システム稼働中に変更することはありませんが、例外として、集塵機フィルターとHEPAフィルターが挙げられます。フィルターに粉塵が蓄積すると、圧力損失またはフィルターの抵抗が増大します。フィルター表面の粉塵蓄積を防止するには、システムに静圧を加える必要があります。
通常、ファンを選定する際は、十分な静圧を加えることでフィルター交換時期が近づいても風量を維持できるよう、耐用期間を通じて十分な風量を確保できるものを選択します。フィルター交換時期が近づいているフィルターは、新しいフィルターと比べて圧力損失が高くなります。溶射集塵機のフィルターは、使用期間を延ばすためにシステム稼働中でもクリーニングできるように設計されています。粉塵蓄積が繰り返され、その後に集塵機のセルフクリーニングサイクルが行われると、システムの静圧要件にわずかな変動が生じます。この変動に対応しないと、システム内の風量が増減し、ダクト内や溶射筐体内に粉塵沈着の問題が発生する可能性があります。
また、溶射筐体内を過剰な風量が通過すると、目標部品から噴射された材料がが引き離されてしまい、コーティング品質に悪影響をもたらす可能性があります。これらの問題を回避するには、空気量の制御が必要となります。最も一般的なファン制御のデバイスはダンパーです。ファンに人工的な負荷を与え、風量を「ダイヤル」で目標値に戻します。風量を維持するためには、ダンパーを必要に応じて開閉し、ダクト内の目標速度を維持します2。システム内に所定の風量を常時維持して行われることはほとんどなく、手動で行うのであれば、有資格者による継続的な監視が必要になります。このように費用がかかる上に、困難とされており、溶射作業のファン制御で「設定したら、後はおまかせ」という考え方が常態化している背景にはこうした理由が潜んでいます。
可変周波数ドライブと風量制御システム
ファンを制御しシステム内の風量を一定に維持する効果的な方法として、可変周波数ドライブ(VFD)があります。VFDは、ヘルツ周波数を調整して、特定の回転速度でファンモーターを動作させます。北米の三相電源は、通常、周波数60 HZで動作しますが、VFDは作業員が周波数を選択してファンの回転速度を増減できます。汚染フィルターの静圧負荷が必要とする場合にのみ、フルスピードで動作し、通常は、必要な静圧量を正確に生成できる程度の低速で動作するのが理想です。この方法を実施することで、コスト削減にメリットをもたらします。「設定したら、後はおまかせ」アプローチで、(溶射筐体の完全換気を確保するため)集塵システムを必要以上の速度で持続的に稼働させる場合と比べ、VFDアプローチは、正確な必要風量速度で稼働するスマートシステムを使用することでエネルギーを節約します。
単純な想定とシステム変数を使用して、これを実証できる数学的モデルがあります。一般的に、VFDや風量制御システムへのアップグレード費用は2年弱で回収できます。それよりも重要なのは、集塵システムが最適速度で稼働することです。最適速度で稼働することで、システム、特に溶射に必要なハイエンドの表面処理フィルターの摩耗を低減できます。VFDや風量制御システムへのアップグレードを決定する際は、次のようなコスト削減要素を考慮する必要があります。
- フィルターコスト
- 人件費
- 廃棄処分費用
- 在庫管理費用
- (新しいフィルターと古いフィルターの廃棄のための)送料
- 品質プロセス
- システムの安定した稼働とシステム内風量の適切な維持
VFD制御
VFDの使用を決定したら、次に入力方法を決めます。システムの静圧変動に関係なく、適切な風量を維持することを目的としています。ダクトシステムに取り付けた風量測定デバイスを使用すると、コントローラーによってファン速度が調整され、変動を是正できます。これらの機器は清浄な空気環境に適しているため、通常は、空気がフィルトレーションされた後のダクト内に設置されます。ファンの排出側のダクトにも設置でき、全風量がシステム全体をスムーズかつ確実に通過できるよう、十分な長さを取る必要があります。
もう1つの方法では、空気が集塵機に入る直前、ダクトシステム内のポイントにおける実際の風量ではなく、システムの静圧を測定します。所定の風量で必要な静圧は、システムが機械的に変更されない限り、変わることのない要素の関数です。フィルターが汚染されるとパルスクリーニングが行われますが、所定の風量で運転していれば、集塵機の吸気側で必要な静圧が変化することはありません。静圧を維持するコントローラーは、集塵システムのVFDを効果的に制御する最も簡単な方法です。フィルターの抵抗が高まると、ファンの生成風量が低下します。この風量の低下によって、集塵機正面にあるダクトの静圧要件が低下するため、コントローラーはVFDにパワーを上げて静圧を維持するよう指示を出します。逆に、フィルターのパルスクリーニングを行うとシステム内の抵抗が低下するため、VFDはパワーを下げて同じレベルの静圧を維持します。その結果、風量がスムーズになり、結果としてコスト削減などのメリットをもたらします。
留意事項
VFDと風量制御システムを使用すると、メリットが限定される場合もあります。1台の集塵機(および1台のファン)を使用して、複数の溶射セルシステムで一度に1つまたは2つのセルだけを間欠的に使用する場合、ファンの可変電力を効率的に利用する方法はありません。これはダクトシステム側の制約であって、VFD側の制約ではありません。
結論
溶射技術は進化しており、新しいアプローチによって、排気システムなどの関連部品に大きな問題をもたらすことも多々あります。また、部分的な部品(サブコンポーネント)の進歩によって、溶射作業全体が改善され、事実上すべての溶射粉塵集塵システムが、可変周波数ドライブの使用によるメリットを得ることができることもあります。風量制御を正確に実施することの重要性がますます高まっており、省エネというメリットを得ることもできます。
¹ 産業用換気:推奨実践マニュアル、第24版、米国産業衛生専門家会議(ACGIH)、3-18ページ、表3-2。
² これは自動車のアクセルペダルを操作することとよく似ています。速度を上げたければ、ドライバーはエンジン出力を上げます。速度を下げるには、エンジン出力を下げます。
